
The Michigan Scientific Wheel Pulse Transducer (WPT) is a compact encoder system that is designed to attach to the wheel of a vehicle. WPT encoder signals calculate wheel rotational velocity, angular position, and rotation direction for vehicle tracking. Engineers use these measurements to track vehicle position in applications such as electric vehicle development and autonomous navigation.
Dead Reckoning in GNSS-Denied Environments
Autonomous vehicles typically rely on Global Navigation Satellite System (GNSS) technology for position tracking. However, GNSS signals can fail in urban, underground or indoor environments. In these GNSS-denied areas, dead reckoning systems provide a critical alternative for maintaining accurate navigation.
Technologies like Wheel Pulse Transducers and accelerometers calculate position based on wheel rotation and motion data. WPT systems serve as dead reckoning sensors and excel in applications such as autonomous forklifts inside warehouses or mining equipment in underground environments, where satellite signals are unavailable. Additionally, WPT can serve as a validation tool for accelerometer-based navigation systems, ensuring their accuracy and reliability in real-world conditions.
Wheel Pulse Transducer for Autonomous Navigation
The assembly is designed to mount quickly and easily to a vehicle wheel. Its compact and light weight design consists of electronics in a rugged housing. Quick Connect Lug Nut Collets or Extended Lug Nuts secure the WPT directly to the wheel. The adapter plates and Quick Connect Lug Nut Collets come in a variety of sizes and configurations to meet any standard wheel dimension. A Magnetic Vehicle Stator Restraint and restraining rod are used to hold the encoder module stator in place while the sensor is being used on the vehicle. Vehicle testing demands a rugged design, so engineers built the WPT to withstand harsh conditions. With rotary seals for an IP67 rating, the WPT is ideal for testing in rainy, snowy, or dirty environments.
mount quickly and easily to a vehicle wheel. Its compact and light weight design consists of electronics in a rugged housing. Quick Connect Lug Nut Collets or Extended Lug Nuts secure the WPT directly to the wheel. The adapter plates and Quick Connect Lug Nut Collets come in a variety of sizes and configurations to meet any standard wheel dimension. A Magnetic Vehicle Stator Restraint and restraining rod are used to hold the encoder module stator in place while the sensor is being used on the vehicle. Vehicle testing demands a rugged design, so engineers built the WPT to withstand harsh conditions. With rotary seals for an IP67 rating, the WPT is ideal for testing in rainy, snowy, or dirty environments.
Optical Encoder for Position Tracking
The Michigan Scientific WPT functions as a wheel encoder for position tracking, providing optical encoder resolutions up to 5,000 pulses per revolution (ppr). Standard resolutions include 360 ppr, 512 ppr, 1024 ppr, and 5,000 ppr. Additional resolutions are available upon request. All encoder choices have four standard encoder outputs: A, B, I, and A⊕B. Outputs A and B are in quadrature, meaning they are 90 degrees out of phase. Output A⊕B is the exclusive OR of the two channels, which doubles the standard resolution of the encoder. The outputs, 0 to 5 digital volt pulses, can drive TTL loads.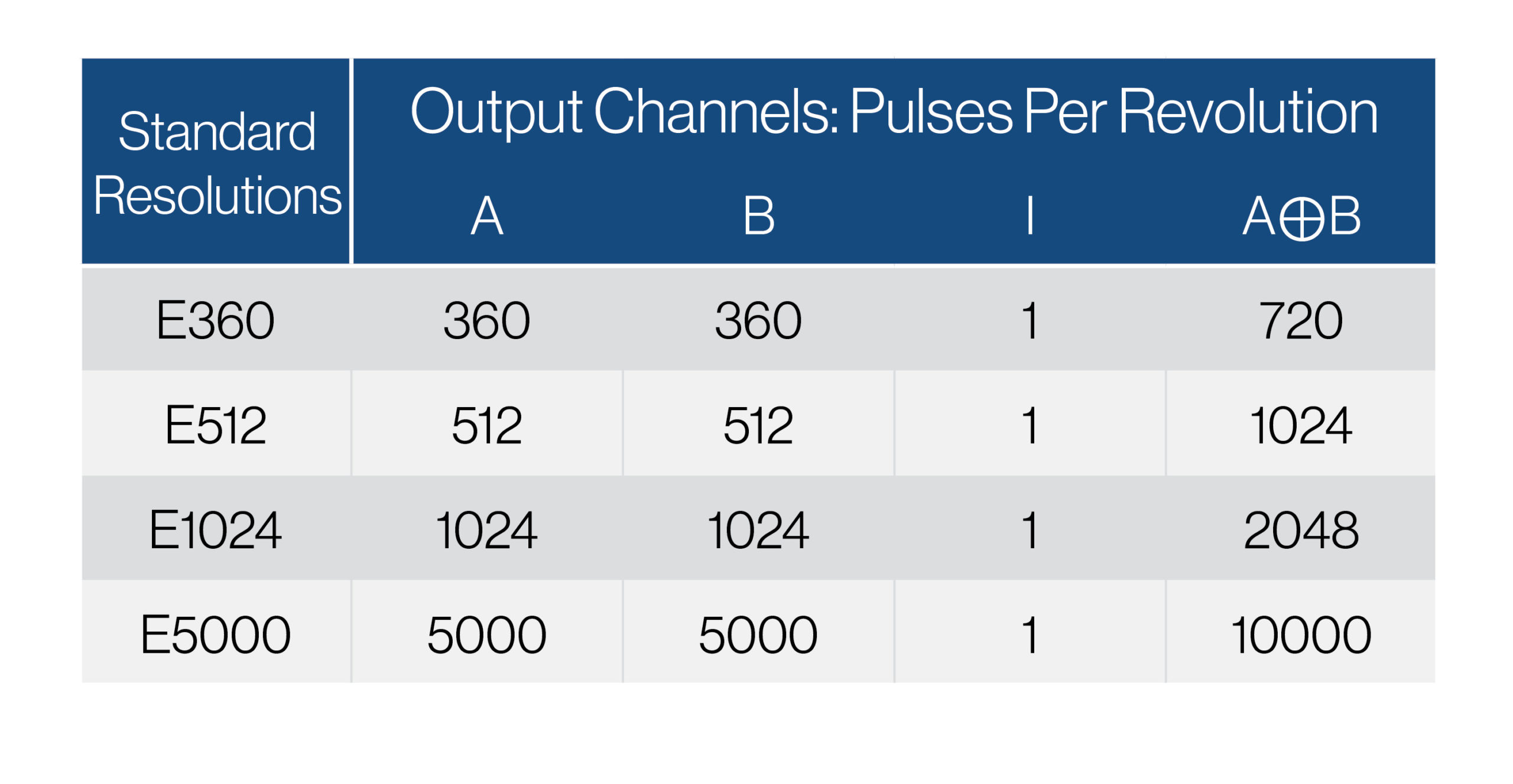
The Michigan Scientific EC-LV Encoder Signal Conditioner converts the 0 to 5 digital volt pulses of the WPT sensor encoder to linear voltages proportional to angular position and angular velocity. The EC-LV can be added in-line with the stator cable and does not require and additional programing. The external switches allow the user to select the range of speed and the direction of rotation.
If you are interested in learning more about how the Wheel Pulse Transducer can be used for your application, please contact a Michigan Scientific Representative today.