
The SR/ERT Series a slip ring assembly with a rotation sensor that is mounted at the end of a rotating shaft. The gold alloy slip rings are used to make high quality electrical connection to strain gages, thermocouples, or other sensors that have been installed on rotating machinery. The current capacity is 0.5 A per connection and the maximum peak resistance variation is 0.1 ohm. The rotation sensor is used to measure rotational velocity, angular position, and direction of rotation. The rotation sensors do not use any of the slip ring connections. All models are available without encoder electronics, which can be used as standard slip ring assemblies.
Features
- 10, 20, or 36 slip ring connections
- Encoder or resolver rotation sensor
- Additional encoder electronics (built in)
- Available with or without weatherproof seals
- Different rotor styles
- Circular connectors or color coded solder terminals
- Instrumentation quality rings & brushes
- Sealed, corrosion resistant metal housing
- Lightweight and compact
- Available without an encoder
Description
The housings of the ERT slip ring assemblies are three to five inches long, depending on the number of slip rings. They weigh about 15 ounces. The rotors are made from high strength stainless steel. The stators are lightweight, nickel-plated, aluminum. Threaded holes are provided for attaching a rotation restraint. Connection information is permanently engraved on the housing. Circular connectors or solder terminals are offered as wiring terminations. A circular connector is usually specified on the stator. On the rotor, test applications needing a quick disconnect specify circular connectors. If space is limited, solder terminals are specified on the rotor. In both cases there is also a choice of orientation.
All housings in this series have been designed to accept contacting rotary seals. Units ordered with these seals (choice W) are completely weatherproof and can survive days of total submersion. The seals limit operation to 2000 rpm maximum. Most wet weather applications, like automotive wheels, are within this range. For higher speeds in dry conditions, order units without the contacting rotary seals. Units without seals are capable of the following speeds:
- 10 rings – 10,000 rpm
- 20 rings – 4,000 rpm
- 36 rings – 2,400 rpm
Unit torque with seals is 21 inch-ounces. Unit torque without seals is three inch-ounces. If the application requires a high speed, weatherproof slip ring & encoder, consider units with noncontacting labyrinth seals in the SR/E512 series.
Documents
Tech Notes
Videos
Options
Rotation sensor choices E256, E360, E500, & E512:
Four optical encoder resolutions are offered, see the table below. Each of these encoder choices have four outputs, shown graphically below. Outputs A and B are in quadrature, meaning they are 90° out of phase. Output I is an index pulse. Output A+B is the exclusive OR of A and B, which doubles the basic resolution of the encoder. The outputs, 0 to 5 volt pulses, can drive TTL loads. The encoders have metal code wheels and rugged electronics, which are designed to tolerate shock and vibration.

Additional encoder electronics can be built into the encoder units. These electronics can provide either a tachometer or resolver output.
The tachometer option provides a voltage proportional to shaft velocity and a voltage proportional to the angular position of the shaft. Full scale for the angular position output is factory-configurable up to +10 Vdc. Full scale for the velocity output is factory-configurable up to ±10 Vdc.
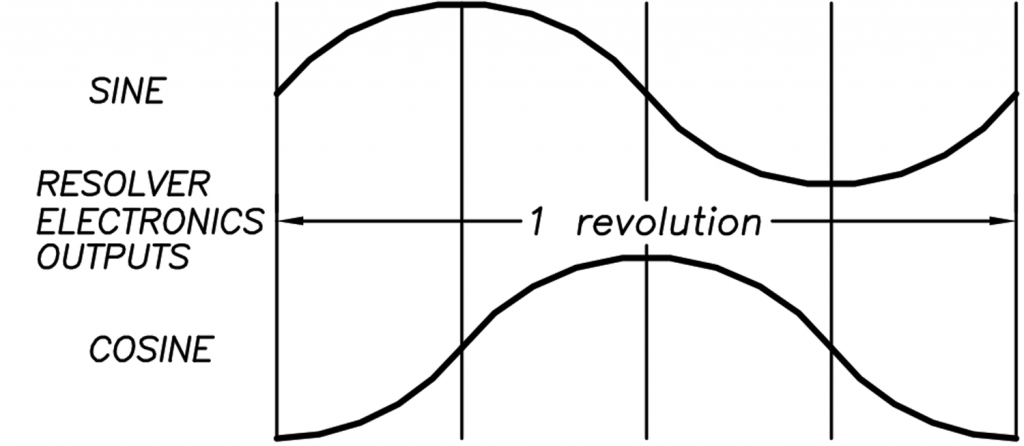
The resolver option provides both a sine and cosine analog output, which are 90 degrees out of phase with each other. Full scale outputs are factory-configurable up to ±10 Vdc.

ERT Models
10 Slip Rings
Encoder (E)

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors

Encoder
Weatherproof Housing
Type M (2.000" diameter)
Rotor solder terminals
Bendix PT stator connector

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor Solder terminals on rotor
Bendix PT stator connector
Resolver (R)

Resolver
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors

Resolver
Weatherproof Housing
Type A (2.500" diameter) rotor Solder terminals on rotor
Bendix PT stator connector
Tachometer (T)

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
Built-in encoder (tachometer) electronics

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
Built-in encoder (tachometer) electronics

Encoder
Weatherproof Housing
Type M (2.00" diameter) rotor
Bendix PT stator connector
Rotor terminals
Built-in encoder (tachometer) electronics
No Encoder

Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
20 Slip Rings
Encoder (E)

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
Alternate stator connector location

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor with solder terminals
Bendix PT stator connector

Encoder
Weatherproof Housing
Type M (2.000" diameter) rotor with solder terminals
Bendix PT stator connector

Encoder
Weatherproof Housing
Type M (2.000" diameter) rotor with solder terminals
Bendix PT stator connector
Resolver (R)

Resolver
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors

Resolver
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
Tachometer (T)

Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connectors
Built-in encoder (tachometer) electronics

Weatherproof Housing
Type A (2.500" diameter) rotor with terminals
Bendix PT stator connector
Built-in encoder (tachometer) electronics

Weatherproof Housing
Type M (2.000" diameter) rotor with terminals
Bendix PT stator connector
Built-in encoder (tachometer) electronics

Weatherproof Housing
Type M (2.000" diameter) rotor with terminals
Bendix PT stator connector
Built-in encoder (tachometer) electronics
No Encoder

Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix PT stator and rotor connector
36 Slip Rings
Encoder (E)

Encoder
Weatherproof Housing
Type M (2.000" diameter) rotor with terminals
Bendix JT stator connector

Encoder
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix JT stator and rotor connectors
Resolver (R)

Resolver
Weatherproof Housing
Type M (2.000" diameter) rotor with terminals
Bendix JT stator and connector

Resolver
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix JT stator and rotor connectors
Tachometer (T)

Encoder and built in electronics
Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix JT stator and rotor connectors
No Encoder

Weatherproof Housing
Type A (2.500" diameter) rotor
Bendix JT stator and rotor connectors
Last Modified: [last-modified]